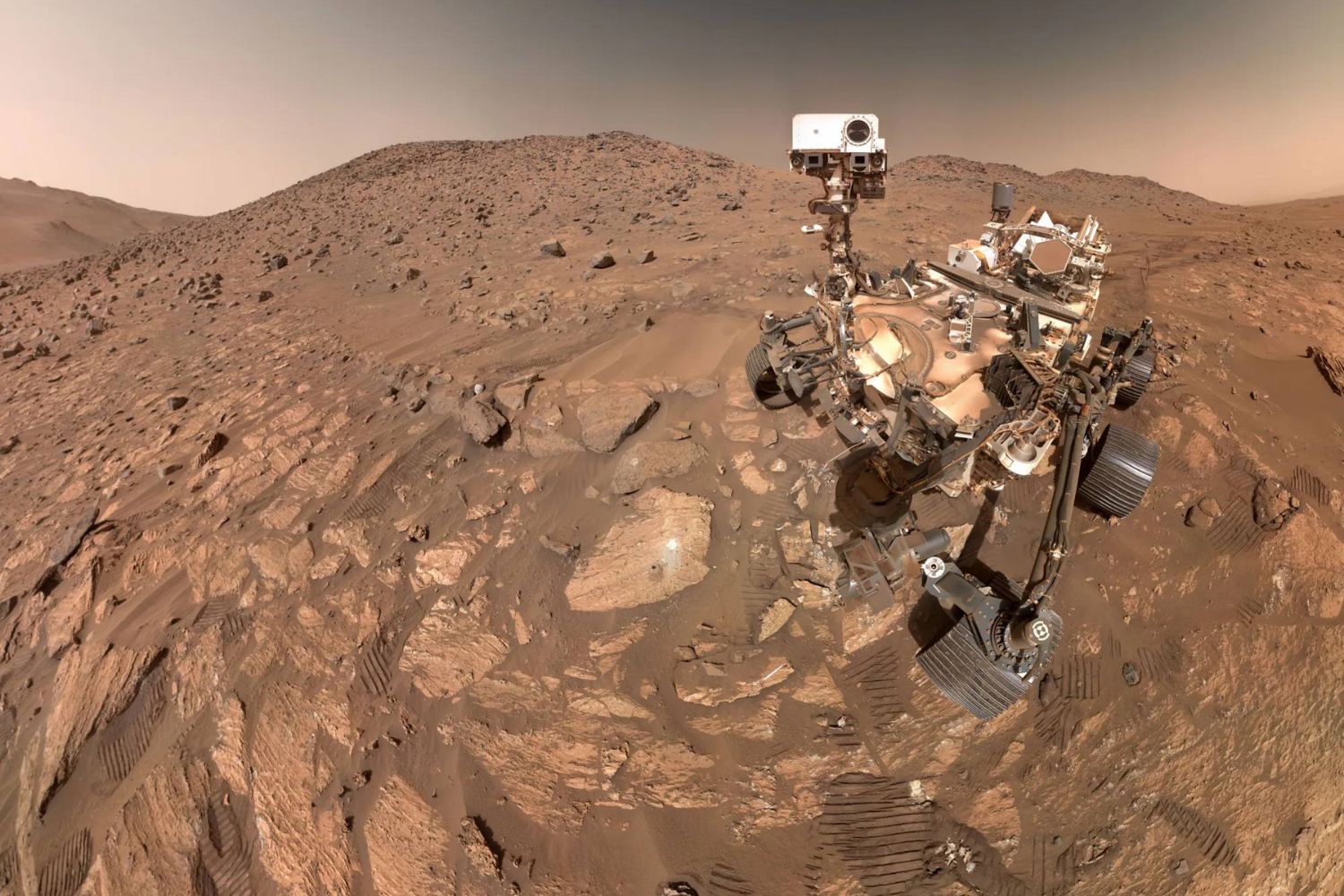
Os robôs que exploram Marte já revolucionaram nossa compreensão do planeta vermelho. Equipamentos como Curiosity e Perseverance analisam rochas antigas, procuram sinais de vida microbiana e coletam dados essenciais para futuras missões humanas.
Mas existe um grande problema: mesmo os rovers mais avançados ainda possuem limitações mecânicas severas quando encontram terrenos extremamente acidentados.
Regiões cheias de rachaduras, encostas instáveis, cavernas e áreas com rochas soltas continuam praticamente inacessíveis para veículos com rodas. E justamente nesses locais podem existir pistas importantes sobre o passado geológico — e talvez biológico — de Marte.
Foi pensando nisso que pesquisadores da Universidade de Gotemburgo desenvolveram um robô completamente diferente dos modelos tradicionais usados hoje na exploração espacial.
Um robô inspirado no movimento de vermes e lagartas
O novo protótipo funciona como uma espécie de robô-oruga flexível capaz de contrair e expandir o próprio corpo para avançar sobre superfícies difíceis.
O projeto faz parte de uma iniciativa apoiada pela Agência Espacial Europeia, conhecida como ESA, e recebeu um nome técnico bastante longo: Soft Annelid-Inspired Robot with Peristaltic Gait using Low Voltage Fault-Tolerant Artificial Muscles for Planetary Exploration.
Apesar do nome complicado, a ideia central é relativamente simples: criar um robô “mole”, inspirado em organismos vivos, capaz de se deformar para atravessar ambientes extremos.
Ao contrário dos rovers tradicionais, ele não possui articulações rígidas nem estruturas metálicas complexas. Seu corpo utiliza materiais flexíveis e músculos artificiais que permitem movimentos parecidos com os de uma lagarta ou minhoca.
Essa abordagem pode representar uma mudança importante na robótica espacial.
Como funciona o “músculo artificial” do robô
O coração do sistema é um atuador elastomérico dielétrico enrolado — uma estrutura que funciona como um músculo artificial.
Quando recebe estímulos elétricos, esse componente se contrai e se expande, criando movimentos ondulatórios capazes de empurrar o robô para frente mesmo em superfícies irregulares.
Segundo o pesquisador Hari Prakash Thanabalan, líder do projeto, um dos maiores desafios era permitir movimentação multidirecional sem depender de sistemas eletrônicos complexos ou múltiplos motores independentes.
A solução encontrada envolveu o uso de eletrodos flexíveis produzidos com nanotubos de carbono de parede simples. Além de leves, esses materiais ajudam o robô a suportar danos físicos e oferecem certa proteção contra a radiação marciana.
Isso é particularmente importante porque Marte possui níveis de radiação muito superiores aos da Terra devido à ausência de um campo magnético global forte.
Um comportamento inesperado chamou atenção dos cientistas
Durante os testes em laboratório, os pesquisadores perceberam algo curioso: o robô conseguia mudar automaticamente de direção ao interagir com pequenas ranhuras presentes na superfície.
As “patas” do dispositivo acabavam se encaixando nessas marcas, fazendo com que ele se orientasse sozinho sem precisar de sistemas eletrônicos sofisticados de navegação.
O comportamento não era esperado inicialmente, mas abriu uma nova linha de pesquisa extremamente promissora.
Os cientistas começaram então a testar diferentes ângulos de ranhuras impressas em 3D e descobriram que superfícies específicas conseguem literalmente “guiar” o robô enquanto ele se move.
Na prática, isso pode permitir formas mais simples e econômicas de controle em ambientes extraterrestres.
O robô ainda não está pronto para Marte — mas esse é o próximo passo
Por enquanto, o sistema ainda funciona apenas em ambiente de laboratório. Os pesquisadores deixam claro que ele ainda está longe de ser utilizado em missões reais.
A próxima etapa será submetê-lo a condições muito mais extremas, semelhantes às encontradas em Marte.
Os testes futuros devem ocorrer nas instalações Mars Yard da ESA, locais criados para simular terrenos extraterrestres com pedras, poeira, inclinações e obstáculos similares aos do planeta vermelho.
Se os resultados continuarem positivos, o pequeno robô flexível poderá inaugurar uma nova geração de exploradores espaciais bioinspirados — máquinas menos rígidas, mais adaptáveis e talvez muito mais eficientes para investigar os lugares onde nenhum rover conseguiu chegar até hoje.
[ Fonte: 20minutos ]